
Fermate
-
Innlegg
1 943 -
Ble med
-
Besøkte siden sist
-
Dager vunnet
166







Fermate sine prestasjoner
")





-
Vi åpner nå tre nye forum for direkte kommunikasjon med smarthus leverandørene! Vi har snakket med tre av de store smarthus leverandørene og signalisert et behov for enkelt å kunne kontakte kompetente personer hos dem for å få svar på mer kompliserte tekniske spørsmål. Det viste seg at de også hadde et ønske om å kunne få ryddet opp i en del feilinformasjon og myter som flyter rundt i sosiale fora. Dette er organisert rundt et eget forum for hver leverandør der det som vanlig er oss forumdeltakere som spør og svarer på det vi kan, men i tillegg vil det være representanter for leverandøren der med egne brukere som kan gi fasit eller korreksjoner. Leverandørenes brukere vil være klart merket så det vil ikke være tvil om hvem du får svar fra. Hvert forum vil ha en underkategori for spørsmål og svar og en for generell diskusjon og kommunikasjon. Forumene finner du her: https://www.hjemmeautomasjon.no/forums/forum/110-leverandører/ Vis full oppføring
-
- 5
-

-

-
 Vi åpner nå tre nye forum for direkte kommunikasjon med smarthus leverandørene! Vi har snakket med tre av de store smarthus leverandørene og signalisert et behov for enkelt å kunne kontakte kompetente personer hos dem for å få svar på mer kompliserte tekniske spørsmål. Det viste seg at de også hadde et ønske om å kunne få ryddet opp i en del feilinformasjon og myter som flyter rundt i sosiale fora. Dette er organisert rundt et eget forum for hver leverandør der det som vanlig er oss forumdeltakere som spør og svarer på det vi kan, men i tillegg vil det være representanter for leverandøren der med egne brukere som kan gi fasit eller korreksjoner. Leverandørenes brukere vil være klart merket så det vil ikke være tvil om hvem du får svar fra. Hvert forum vil ha en underkategori for spørsmål og svar og en for generell diskusjon og kommunikasjon. Forumene finner du her: https://www.hjemmeautomasjon.no/forums/forum/110-leverandører/
Vi åpner nå tre nye forum for direkte kommunikasjon med smarthus leverandørene! Vi har snakket med tre av de store smarthus leverandørene og signalisert et behov for enkelt å kunne kontakte kompetente personer hos dem for å få svar på mer kompliserte tekniske spørsmål. Det viste seg at de også hadde et ønske om å kunne få ryddet opp i en del feilinformasjon og myter som flyter rundt i sosiale fora. Dette er organisert rundt et eget forum for hver leverandør der det som vanlig er oss forumdeltakere som spør og svarer på det vi kan, men i tillegg vil det være representanter for leverandøren der med egne brukere som kan gi fasit eller korreksjoner. Leverandørenes brukere vil være klart merket så det vil ikke være tvil om hvem du får svar fra. Hvert forum vil ha en underkategori for spørsmål og svar og en for generell diskusjon og kommunikasjon. Forumene finner du her: https://www.hjemmeautomasjon.no/forums/forum/110-leverandører/ -
 Ah dette er ikke en Dorrman men en Heimgard lås?
Ah dette er ikke en Dorrman men en Heimgard lås? -
Dette er jo super interessant. Har Heimgard HUBen noen driftskost? / Krav til skykobling?
-
Nå fant jeg svaret og poster det her om noen kommer opp i samme problemet. Jeg har missforstått; jeg trodde at feilen kommer fordi systemet ikke kjenner igjen devicen i siste trinn (step 3) men det er noe helt annet som skjer: Zigbee finner devicen og interviuer den korrekt, men før jeg rekker å gi den HomeSeer navn, rom og etasje så hopper devicen ut av Zigbee nettet igjen. Så denne melingen: betyr ikke at den ikke kjenner en igjen, det betyr at den ikke er på nettet lengre! Etter å ha googlet litt fant jeg et triks som virker: Når interviewingen er ferdig og HS-Plugin er klar for neste trinn (Trinn3: HS Navn, rom og etasje), kutt strømmen til devicen før den rekker å hoppe av Zigbee nettet. Du kan da gi den navn og når du er ferdig kan du skru den på igjen. Jeg har forsøkt å oppdatere FW i IKEA devicen for å se om den lar være å hoppe av da men det gjorde ingen forskjell. Jeg har IKKE forsøkt å oppgradere SONOFFen min..
- 8 svar
-
- 1
-
-
Jeg sliter med å få inn IKEA sin LED2107c4 Jeg har oppdatert ZigBee2MQTT til siste versjon og Zigbee finner den korrekt men på siste trinn får jeg denne "Could not find device definitio for xxxx" 😞 Jeg leser at andre har problemer som de løser: I solved the problem with: # Run the update script from the Zigbee2MQTT directory cd /opt/zigbee2mqtt ./update.sh Men er ikke det noe Linux greier? Hva gjør jeg i windows installasjonen min??
-
Hei @Tore Ringvold og @altibox Hva er det dere poster her og hva er det dere vil oppnå? (Er det en kommunikasjon mellom Altibox kundeservice og Altiboks bruker?)
-
Takk! Har oppdatert guiden
-
Takk ja, jeg burde jo egentlig bruke Visual Studio (som jeg bruker på jobb) men du vet, det var det å ta seg tid til å sette det opp da.... 😉 (Noen brukde skrive en guide...) Dette ser velig bra ut. Skal vurdere det til høsten når all reising er over og jeg kommer i smarthus-fikle-modus igjen. Takk!
-
Jeg vurderer det samme. Hvordan er integrasjonen med Alexa i HA? Kan jeg spørre Alexa og ting og få svar der teksten er laget med scripts i HA?
-
Takk! Det var denne som skulle til:

- 6 svar
-
- 1
-
-
Nei 😞 Er det noe galt her?
-
Takk for hjelp! Slik som dette? Jeg får det ikke til å virke Ser du noe feil?
-
Jeg har satt opp en Shelly Plug S med MQTT og i mcsMQTT får jeg alle HS devicer som det er trafikk på. Dvs alle status devicer som strøm spenning osv. Men hvordan får jeg en device som kan skru den av og på? Jeg tipper på at om jeg bruker den riktige kommandoen i MQTT Explorer som vil den dukke opp i mcsMQTT men jeg skjønner ingen ting av MQTT dokumentasjonen 😞 Hve er topic, og hvilken palyload? Ett etter annet med switch:0 men hva?? Hjelp!
-
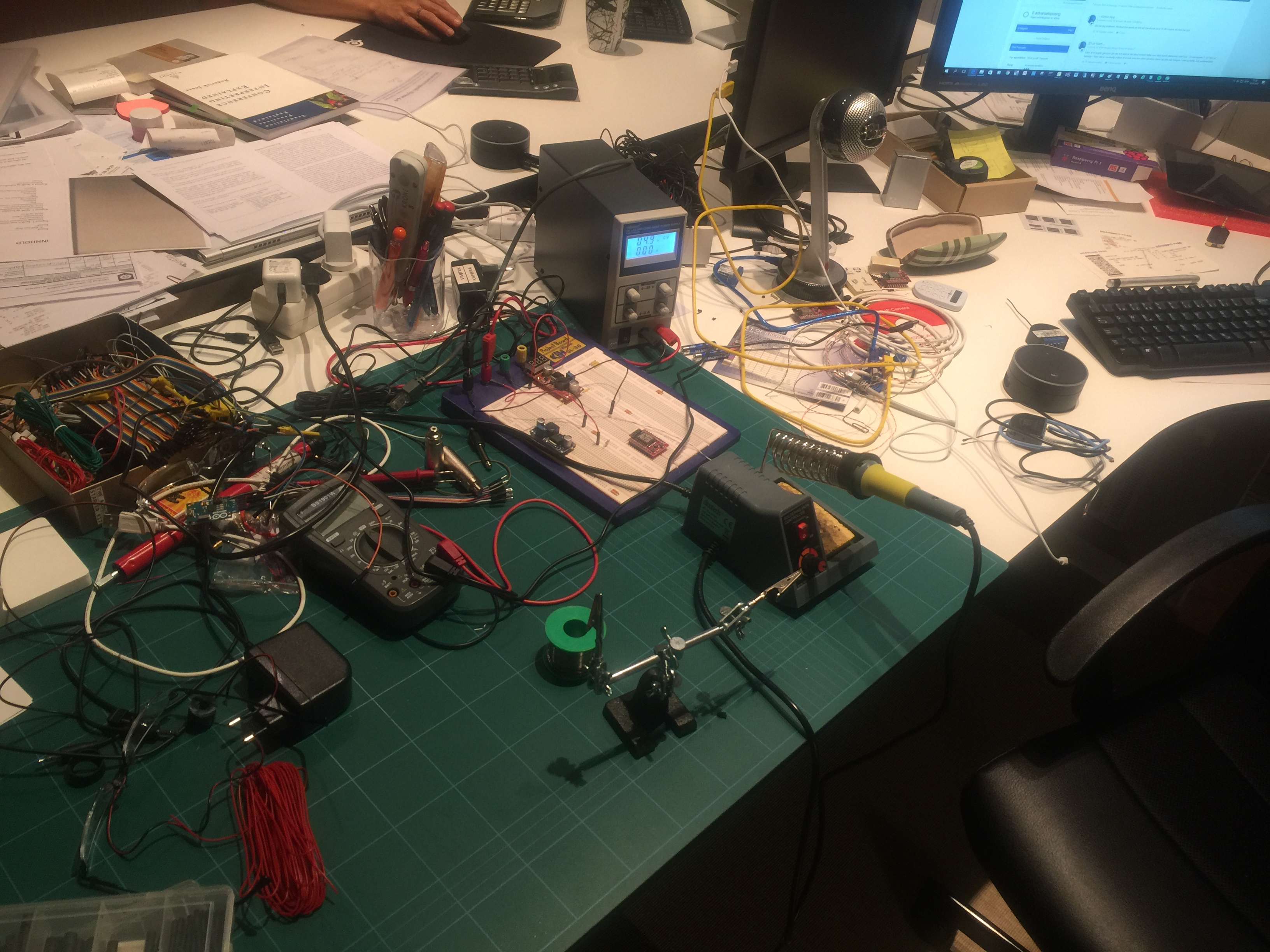
 Jeg har jobbet ganske lenge med dette prosjektet men fordi det var på hytta i Danmark og fordi jeg fikk problemer med et dårlig power er det først nå jeg er ferdig nok til å vise det fram. Jeg ser at boksen har et hull for å kunne plugge inn en USB til ESP32en, fordi dette var før jeg visste hvordan en kan bruke OTA for oppgradering isteden 🙂
Jeg har jobbet ganske lenge med dette prosjektet men fordi det var på hytta i Danmark og fordi jeg fikk problemer med et dårlig power er det først nå jeg er ferdig nok til å vise det fram. Jeg ser at boksen har et hull for å kunne plugge inn en USB til ESP32en, fordi dette var før jeg visste hvordan en kan bruke OTA for oppgradering isteden 🙂